신경과학 기반 강화학습 이론으로 성능·효율·속도 균형적 설계 가능
이번 연구는 인간의 두뇌가 기존의 인공지능 알고리즘이 해결하지 못하는 부분을 해결할 수 있다는 사실에 기반한 신경과학-인공지능 융합해 진행됐다.
성능, 효율, 속도의 균형적 설계와 같은 다양한 공학적 난제를 해결할 수 있는 신경과학 기반 강화학습 이론을 제안한 것으로 새로운 인공지능 알고리즘 설계에 활용될 수 있다.
최적제어 이론에서 출발한 강화학습은 기계 학습의 한 영역으로 지난 20여년 동안 꾸준히 연구된 분야이다. 지난 5년 동안은 딥러닝 기술을 발전과 맞물려 급격한 성장을 이뤘다.
딥러닝 기반 강화학습 알고리즘은 최근 알파고와 같은 전략 탐색 문제, 로봇 제어, 응급실 비상 대응 시스템과 같은 의료 진단 등 다양한 분야에 적용되고 있다. 그러나 주어진 문제에 맞게 시스템을 설계해야 하고, 불확실성이 높은 환경에서는 성능이 보장되지 않는다는 한계점이 있었다.
강화학습은 의사 결정, 계산신경과학 분야에서도 지난 20년간 꾸준히 연구되고 있다. 이상완 교수는 2014년 인간의 전두엽-기저핵 뇌 회로에서 이종 강화학습을 제어한다는 신경과학적 증거를 학계에 발표한 바 있다. 2015년에는 같은 뇌 회로에서 고속 추론 과정을 제어한다는 연구를 발표했다.
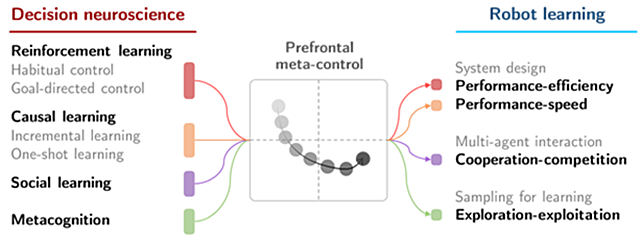
연구팀은 이번 연구에서 강화학습 등의 개별 인공지능 알고리즘이 해결하지 못하는 공학적 문제를 인간의 두뇌가 이미 해결하고 있다는 사실에 기반한 '전두엽 메타 제어' 이론을 제안했다.
중뇌 도파민-복외측전전두피질 네트워크에서 외부 환경에 대한 학습의 신뢰도를 스스로 평가할 수 있는 보상 예측 신호나 상태 예측 신호와 같은 정보를 처리한다.
인간 두뇌는 이 정보들을 경쟁적-협력적으로 통합하는 프로세스를 통해 외부 환경에 가장 적합한 학습과 추론 전략을 찾는다.
이러한 원리를 단일 인공지능 알고리즘이나 로봇설계에 적용하면 외부 상황변화에 강인하게 성능, 효율, 속도 세 조건(performance-efficiency-speed tradeoff) 사이의 균형점을 유지하는 최적의 제어 시스템을 설계할 수 있다.
다수의 인공지능 개체가 협력하는 상황에서는 서로의 전략을 이용함으로 협력-경쟁 사이의 균형점을 유지할 수 있다.
이상완 교수는 "우리 두뇌는 공학적 난제를 의외로 쉽게 해결하고 있음을 알 수 있으며, 이 원리를 인공지능 알고리즘 설계에 적용하는 뇌 기반 인공지능 연구는 해외 유수 기관에서도 관심을 두는 신경과학-인공지능 융합 연구 분야"라며 "장기적으로는 차세대 인공지능 핵심 연구 분야 중 하나로 자리를 잡을 것으로 기대한다"고 말했다.
이번 연구는 과학기술정보통신부와 IITP의 연구개발 사업, 삼성전자 미래기술육성센터의 지원을 받았다. 연구는 이상완 교수, 이지항 박사, 안수진 박사과정이 주도했다. 연구 결과는 국제 학술지 '사이언스 로보틱스(Science Robotics)'에 지난 16일자 온라인판에 포커스 형식으로 게재됐다.
댓글 정렬