원자력연 연구진, 무인 로봇 'RAM' 개발···기동성·지속성 등 장점 갖춰
원전사고 모니터링, 방사선오염지도 작성 가능
가까운 미래 구축될 것으로 예상되는 원자력 안전 감시 체계 모습이다. 아직까지 드론 기술, 로봇 기술에 더 많은 발전이 필요하지만 지상과 공중에서 안전 감시가 가능한 로봇을 개발하고 있는 연구진이 있다.
원자력 분야에서는 원자력 발전소 운영, 원전 정찰, 원전 제염해체 등의 용도로 다양한 로봇이 개발되어 왔다. 특히 실제 원전에 방사선 누출 사고의 예방과 실제 누출에 대비해 이를 신속하게 정찰할 로봇이 요구된다.
한국원자력연구원 원자력로봇연구실 소속 4명의 연구진은 지난 2015년부터 개발에 착수해서 기존 로봇의 성능을 획기적으로 개선한 원전 사고 모니터링 겸 방사선 오염 지도 작성 로봇 'RAM'을 개발하는데 성공했다.
최영수 박사와 함께 연구진의 주축으로 로봇을 개발한 박종원 박사를 만나 원자력 안전 감시 체계와 개발된 로봇의 특징에 대해 들어 봤다.

"기존 로봇 차량은 탱크처럼 궤도형 바퀴로 제작됐습니다. 차량 내구성은 높았지만 시속 10km 이내로 속력이 느렸죠. 사고가 발생하면 신속하게 현장에서 상황을 파악하고 대비해야 했는데 사실상 불가능했습니다."
박종원 박사에 따르면 원전에 사고가 발생한다고 가정할 경우, 고방사선 노출 위험성이 있는 현장에 인간 대신 투입할 로봇이 필요하다. 이 로봇은 가로 세로 둘레만 10km 이상되는 원전과 인근 지역을 신속하게 이동하며 상황을 전달할 필요성이 있다.
현재 원전 주변이나 대학 등에는 일반적으로 고정형 환경방사선측정장비가 구비되어 있어 실시간으로 환경방사선을 측정하고 있다. 전국에서 수집된 환경방사선 자료는 원자력 규제 전문 기관인 KINS(한국원자력안전기술원)으로 전송된다.
또한, 고정형 설비 뿐만 아니라 비상훈련대응을 통해 헬리콥터를 활용해 시료를 채취하거나 원자력 발전본부마다 구비한 환경감시차량을 통해 만일의 사고에 대비하고 있다.
그러나 기존의 환경감시차량은 이동속도가 느리고 무인이 아니어서 운전자가 사고 지역에 접근해야 한다는 문제점이 존재했다. 배터리 수명이 짧아 운영 가능한 시간이 짧았고, 다양한 측정 감시 장치를 실을 수 없다는 것도 한계점으로 꼽혔다.
이러한 상황에서 개발된 로봇의 이름은 RAM(Remote control system for accident monitoring)이다. 사전적인 의미로는 사고 감시를 위한 원거리 통제 시스템이다. 발음상으로는 컴퓨터에 활용되는 메모리를 의미하는 것 같지만 숫양(RAM)처럼 사방 곳곳을 누비라는 의미도 담겨 있다.
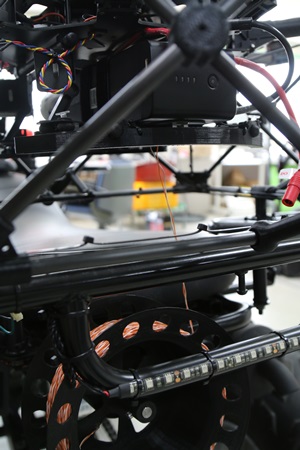
개발된 로봇은 언뜻 보면 단순하다. 자동차와 드론으로 구성된 것이 전부다. 하지만 기존의 상용화된 차량과 드론을 개조하고 카메라와 방사선 모듈, 데이터 수집장치가 부착되면서 새로운 개념의 정찰 로봇으로 탈바꿈했다.

로봇은 산악차량(All terrain vehicle)을 개조해서 만들어졌으며 실제 지진이나 수소폭발과 같은 악조건에도 견딜 수 있도록 설계됐다. 계단이나 불규칙한 지형을 빠르게 돌파하는 것도 가능하다. 또 내연기관을 사용하기 때문에 5시간 이상을 정찰 가능하며, 60km 이상의 속력을 낼 수 있다.
차량 위에는 초소형 방사선센서 모듈인 검정색 박스가 부착되어 있다. 이 모듈을 통해 사고 발생 시 방사선 오염 분포를 확인해 방사선 지도 작성이 가능하다.
기동성이 좋아 사고 지역을 훝으면서 방사선 지도를 만들 수 있다. 수치를 데이터화해서 원격제어장치 통해 데이터로 축적하고, 방사선 지도 만들면 원격제어로 LTE 속도로 받아 볼 수 있다는 것이 장점이다.
다만 아직까지 배터리 문제가 큰 변수다. 현 기술 수준으로는 길어야 30분 비행하는 것에 불과하다. 이동 시간을 고려했을 때 실제 사고 현장에서 투입하기에는 한계점이 존재한다.
이를 해결하기 위해 원자력연 연구진은 GIST 연구진과 함께 드론 차량 충전 방식을 연구하고 있다.
이 연구가 완료되면 차량에서 50m 공중에 떠 있는 드론에 가는 선으로 전력을 전송할 수 있게 된다. 사고 발생 시 지상차량이 함께 이동하는 동안 전력이 공급된다. 드론이 움직여야 할 위치에 접어들면 지속적으로 차량과 이동하거나 원격제어를 통해 코드를 탈착해 자유롭게 관측활동을 수행할 수 있다.
개발된 시스템을 적용하면 향후 원전 뿐만 아니라 항만, 제철소, 석유화학플랜트 공장 등 산업 현장에서 활용가능하다. 실제 미국에서도 군사용 등에 활용하고 있다. 넓은 군대 기지를 순찰하기 위해 지상차량을 활용해 철책 경계를 수행하며, 드론으로 상공을 체류하며 정찰, 탐사 등을 수행하고 있다.
최근 연구진은 VR과 같은 최신식 장비 적용도 적극 검토하고 있다. 드론 이동시 원격제어를 할 경우 방위각, 위치, 이동 속도 등을 실시간으로 확인하기 위해 VR 창에 OSD(On board Display)를 구현하면 상황을 예측하는데 도움이 된다는 이유에서다. 또 드론 콘트롤러와 같은 핵심 자재도 고방사선에 견딜 수 있도록 조사와 시험 과정을 거쳐 선별된 부품을 도입할 예정이다.
박종원 박사는 "연구실 레벨에서는 프로토타입을 제작하기 때문에 완성도가 부족할 수 밖에 없다"면서 "실제 환경과 유사한 곳에서 운영시험을 통해 시스템 개선 작업이 필요하다"고 말했다.
박 박사는 "한국은 원전을 운영하고 있기 때문에 원자력 안전 측면을 계속 강조하면서 만일의 사고에 대비해야 한다"고 덧붙였다.


댓글 정렬