원자력연, 비파괴 검사 로봇 개발…플랜트 배관 안전성 검사 활용
|
| ▲배관 내부를 3차원으로 재현한 모습. ⓒ2012 HelloDD.com |
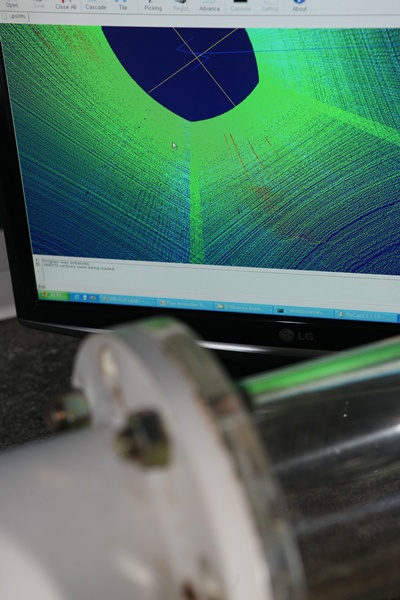
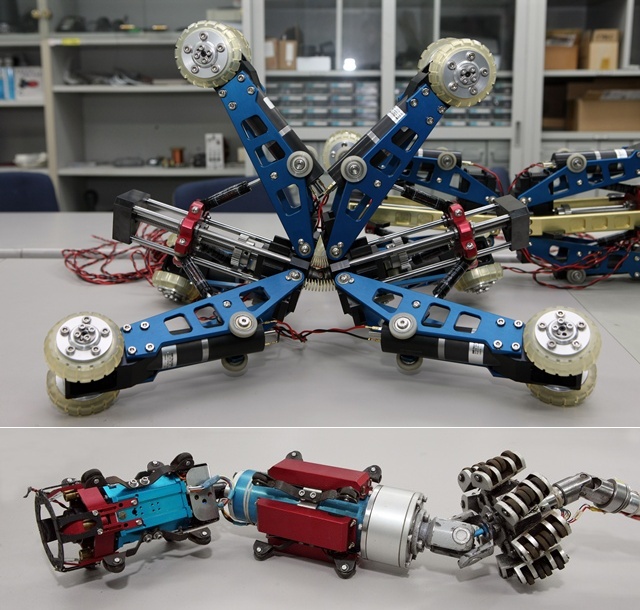
김 박사팀이 개발한 로봇은 4방향에서 발사되는 레이저 주사를 이용, 배관 내부의 모습을 3차원으로 복원한 다음 고화질로 전송함으로써 1mm 이하(탐지 가능 최소 크기 0.47mm) 크기의 미세 결함까지 정확하게 탐지할 수 있다. 또한 이동시 0.1mm 간격으로 레이저를 발사해 이동 거리를 측정함으로써 로봇의 위치 좌표와 결함의 발생 위치를 정확히 알아낼 수 있다. 아울러 크기 대비 출력이 높은 모터를 선택함으로써 소형이면서도 충분한 구동력을 확보하고, 로봇이 배관에 접촉해 나선형으로 이동하는 나사 구동 방식을 채택해 30kg의 물체까지 견인할 수 있는 강한 추진력을 얻을 수 있었다. 이로인해 배관 내부를 최대 100m까지 이동할 수 있게 됐다.
원자력연 측에 따르면 개발된 로봇은 이물질과 파임, 용접 부위 불량 등 미세 결함으로 인한 배관 파손 및 폭발 가능성을 사전에 탐지할 수 있어 일차적으로는 화력 발전소 비 가동 기간에 투입돼 배관 안전성 검사에 활용될 수 있을 것으로 보인다. 김 박사는 "배관 내부의 세 축을 지지점으로 삼아 전진하며 지름 50㎝ 중구경 배관을 검사할 수 있는 로봇도 개발, 소구경 배관 검사 로봇과 연계 활용시 다양한 구경을 가진 배관 검사에 활용할 수 있다"며 "이번에 개발된 기술을 기반으로 향후 지름 10㎝ 미만의 극소구경 배관을 포함, 다양한 배관을 검사할 수 있는 로봇을 개발해서 원자력 발전소, 화학 플랜트, 가스배관 검사 등에 확대 적용할 계획"이라고 말했다.
|
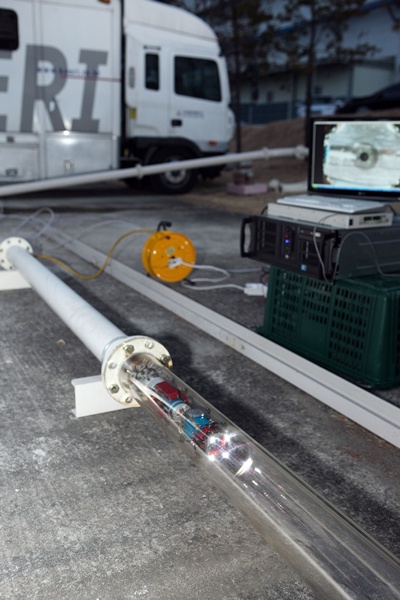
| ▲투명 배관에 넣고 작동하는 모습. ⓒ2012 HelloDD.com |
임은희 기자
redant645@hellodd.com
댓글 정렬